01 · Spec
Define the task
We scope tasks, environments, embodiments, and success criteria with your team — manipulation, navigation, or both.
 Diffraction
Diffraction A policy trained on estimated poses inherits the estimation error. So we don't estimate: skilled operators demonstrate manipulation and navigation tasks inside the same calibrated POD environments we use for Ego/Exo4D capture — measured end-to-end, in real-world conditions, and tuned for deployment. Exports ship ready for LeRobot and GR00T training workflows.
We don't sell whatever happened to be recorded. You define the policy you need; our operators and pipeline manufacture the demonstrations to match.
We scope tasks, environments, embodiments, and success criteria with your team — manipulation, navigation, or both.
Trained operators perform the demonstrations in real-world conditions — real clutter, real lighting, real objects — inside instrumented capture environments.
Skeletal hand & body pose, depth, measured camera trajectory, object detection with persistent IDs, and 3D scene reconstruction — 60+ metadata fields per segment.
RLDS, the standard robot-training format, plus LeRobot and GR00T policy exports — tuned for your deployment pipeline.
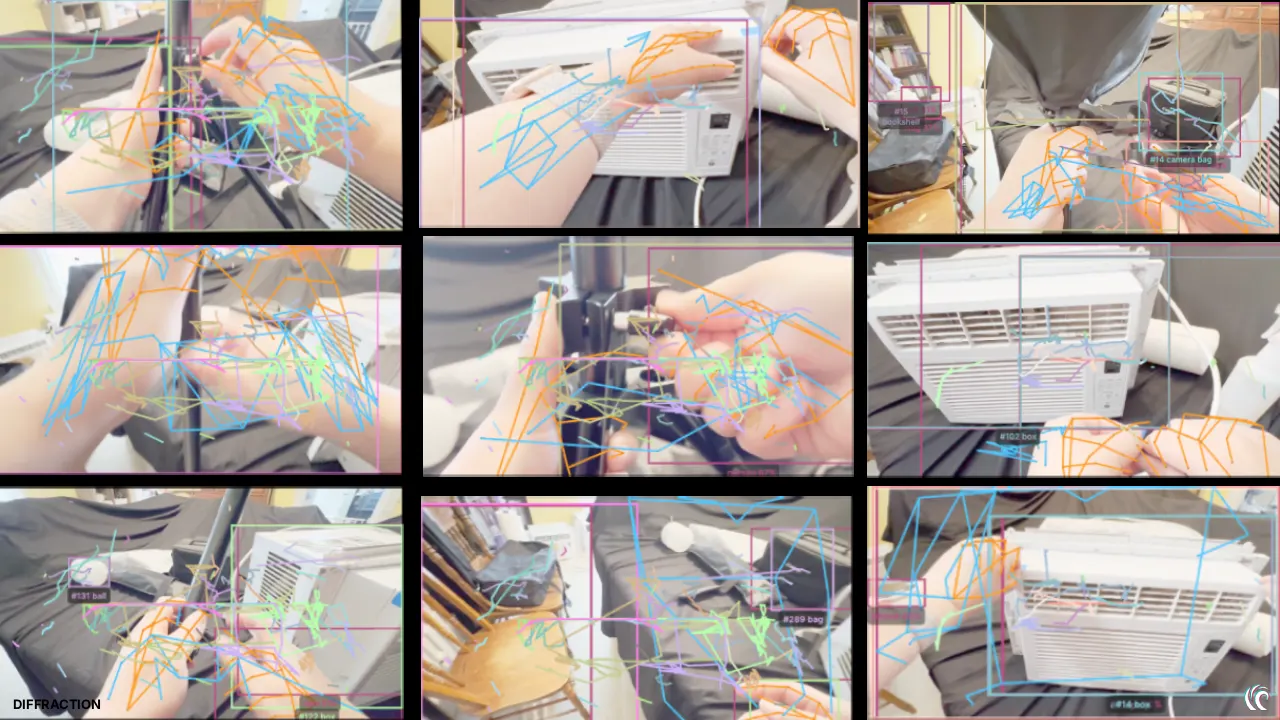
Both-hand skeletal pose captured during real tasks — the foundation ground truth behind every humanoid robotics policy.
Measured camera trajectories, point-cloud scene reconstruction, and persistent object tracking ship alongside every demonstration.
Every demonstration carries a cryptographically signed certificate proving consent and licensing. Revocation-aware, with EU AI Act transparency baked in.
Tell us the task, the embodiment, and the format your training pipeline expects. We'll handle operators, capture, labeling, and certification.